


사업안내
Shake hands with the future
DOBOT과 만나세요
The smart, super precise desktop robot arm
-
M1

M1 SPECIFICATIONS
Type Dobot M1 Controlled Axes 4 Payload 1.5kg Max.Reach 400mm Position Repeatabilty (control) 0.02mm Cycle time 0.45s Range of Motion J1 ±90˚ J2 ±135˚ Z 250mm R ±360˚ Maximum Speed J1 160˚/s J2 160˚/s J1+J2 2000mm/s Z 1000mm/s Power Supply 100-240VAC. 50-60Hz Control platform ARM Cortex-A9+ARM Cortex-M4+FPGA Operating System Linux Interface Ethernet,RS-232C,USB HID I/O 24V inputx8, 24V outputx8 Software Dobotstudio -
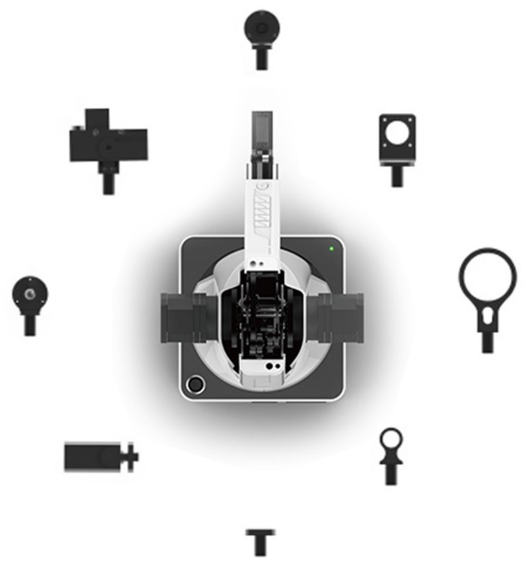
MAGICIAN

MAGICIAN SPECIFICATIONS
Type Dobot Magician Controlled Axes 4 Payload 0.5kg Max.Reach 320mm Position Repeatabilty (control) 0.2mm Range of Motion J1 ±90˚ J2 0˚ ~ 85˚ J3 -10˚ ~ 95˚ J4 ±90˚ Maximum Speed J1 160˚/s J2 160˚/s J3 160˚/s J4Z 300˚/s Power Supply 100-240VAC. 50-60Hz Control platform ARM Cortex-M3+FPGA Operating System / Interface USB etc. I/O 1.I/O x 10 (Configurable as Analog Input or PWM Output)
2.Controllable 12V Power output x 4
3.Communication Interface(UART,Reset,Stop,12V,5V and two I/O included)
4.Stepper x 2Software Dobotstudio

상호명 : 블루아이즈 | 사업자등록번호 : 626-04-00440 | 주소 : 서울특별시 강서구 마곡중앙로 161-8, 두산더랜드파크 A동 819호 (마곡동757)


Copyright ⓒ hu4858.s14.hdweb.co.kr All rights reserved.